//www.elegoo.com
//2016.12.12
include “Stepper.h”
include “IRremote.h”
/—– Variables, Pins —–/
define STEPS 32 // Number of steps per revolution of Internal shaft
int Steps2Take; // 2048 = 1 Revolution
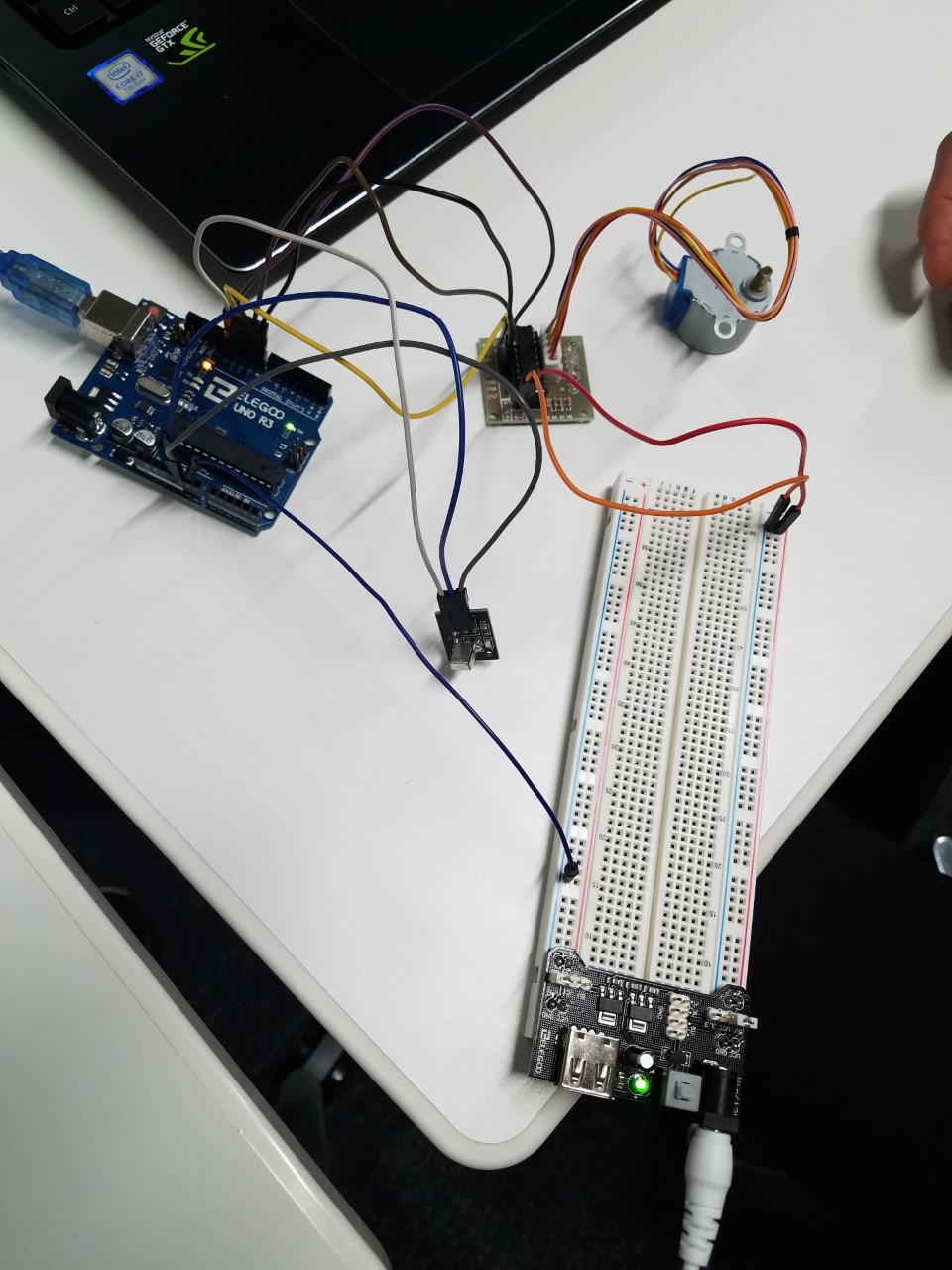
int receiver = 12; // Signal Pin of IR receiver to Arduino Digital Pin 6
/—–( Declare objects )—–/
// Setup of proper sequencing for Motor Driver Pins
// In1, In2, In3, In4 in the sequence 1-3-2-4
Stepper small_stepper(STEPS, 8, 10, 9, 11);
IRrecv irrecv(receiver); // create instance of ‘irrecv’
decode_results results; // create instance of ‘decode_results’
void setup()
{
irrecv.enableIRIn(); // Start the receiver
}
void loop()
{
if (irrecv.decode(&results)) // have we received an IR signal?
{
switch(results.value)
{
case 0xFFA857: // VOL+ button pressed
small_stepper.setSpeed(500); //Max seems to be 500
Steps2Take = 2048; // Rotate CW
small_stepper.step(Steps2Take);
delay(2000);
break;
case 0xFF629D: // VOL- button pressed
small_stepper.setSpeed(500);
Steps2Take = -2048; // Rotate CCW
small_stepper.step(Steps2Take);
delay(2000);
break;
}
irrecv.resume(); // receive the next value
digitalWrite(8, LOW);
digitalWrite(9, LOW);
digitalWrite(10, LOW);
digitalWrite(11, LOW); }
}/* –end main loop — */
